Visual answer
The Autonomous Driving Loop
Sensor data becomes a labeled world model, then a set of predictions, then a planned path, then physical control commands.
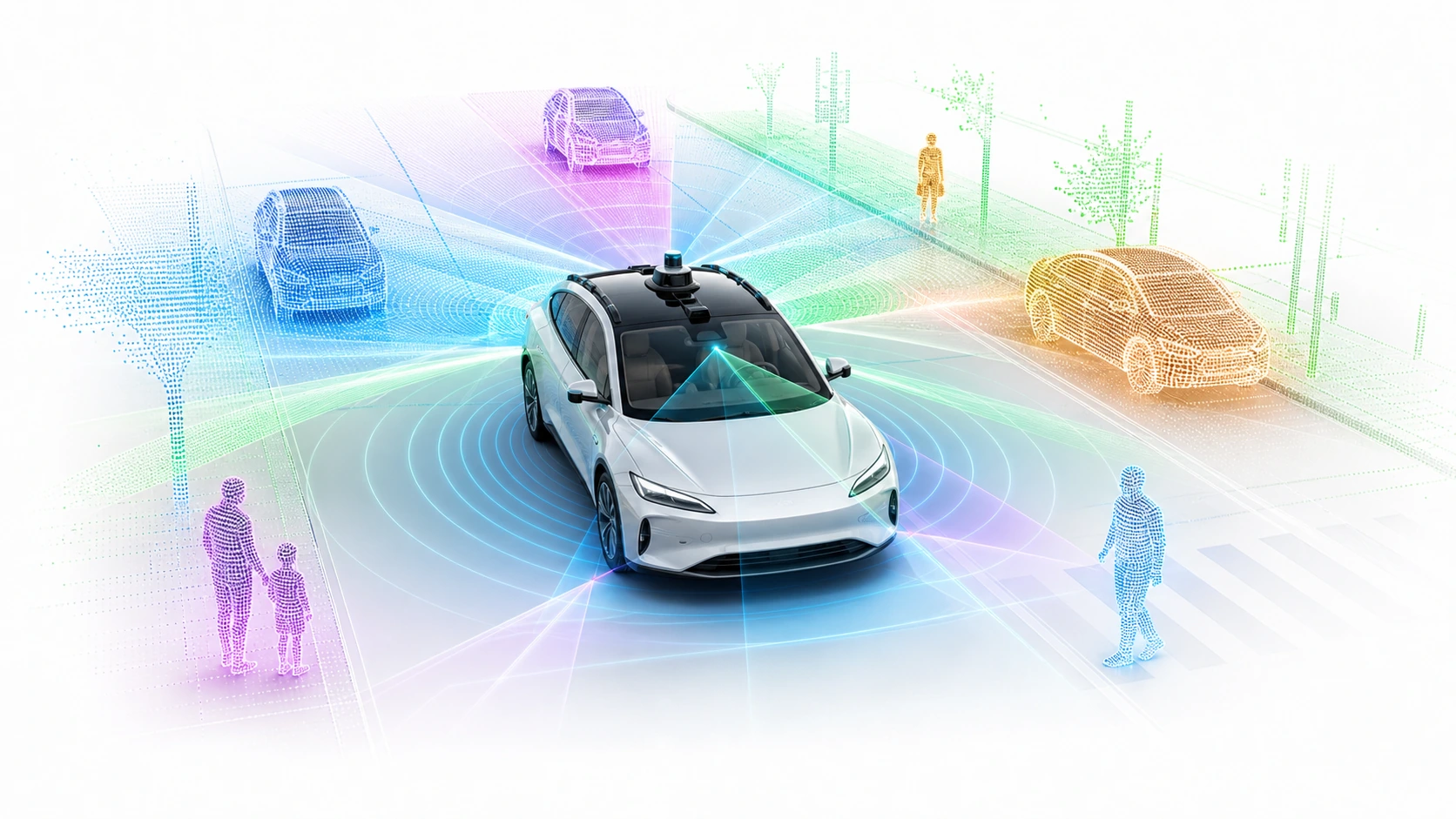
Sensors collect raw data
Cameras, LiDAR, radar, GPS, and inertial sensors observe the world from different angles.
Perception labels the scene
AI identifies vehicles, lanes, signs, pedestrians, curbs, and obstacles.
Prediction models futures
The system estimates likely movement for every relevant road user.
Planning selects a path
Software scores possible trajectories for safety, legality, comfort, and speed.
Control executes movement
The chosen trajectory becomes steering, brake, and throttle commands.
The loop restarts
The system replans many times per second as the world changes.
Answer
The Quick Answer
Self-driving cars fuse cameras, radar, LiDAR, maps, and machine learning to perceive the road, predict what others will do, plan a safe path, and control steering, braking, and acceleration in real time.
A two-ton machine navigates traffic at highway speed, making decisions faster than a human can blink.
Mechanism
From Sensors To Steering Wheel
Autonomous driving is a loop: perceive, predict, plan, act, repeat.
- 1
Sensors collect raw data
Cameras, LiDAR, radar, GPS, and inertial sensors observe the world from different angles. Analogy: Multiple witnesses describing the same scene.
- 2
Perception labels the scene
AI identifies vehicles, lanes, signs, pedestrians, curbs, and obstacles. Analogy: A spotter calling out everything in view.
- 3
Prediction models futures
The system estimates likely movement for every relevant road user. Analogy: A chess player thinking several moves ahead.
- 4
Planning selects a path
Software scores possible trajectories for safety, legality, comfort, and speed. Analogy: A navigator comparing thousands of routes.
- 5
Control executes movement
The chosen trajectory becomes steering, brake, and throttle commands. Analogy: Hands turning intention into precise motion.
- 6
The loop restarts
The system replans many times per second as the world changes. Analogy: A pilot constantly correcting course.
Curiosities
Details That Make It Stranger
These are the facts that turn the simple explanation into a better story.
Robotaxis already operate
Driverless ride services exist in defined cities and conditions.
Cars know uncertainty
Systems estimate confidence and can slow or stop when confidence collapses.
The first DARPA challenge failed
In 2004 no vehicle finished the desert course; one year later several did.
Maps are pre-built
Many vehicles know lane geometry before arriving.
Story
The DARPA Grand Challenge
The 2004 DARPA race through the Mojave Desert ended in failure. In 2005, five vehicles completed the course, proving autonomous driving was becoming viable.
That competition seeded the researchers and companies that shaped the modern autonomous vehicle industry.
Hidden mechanism
The Long Tail Problem
Driving is full of rare events: unusual construction, strange gestures, objects falling from trucks, and people behaving unpredictably.
The deeper insight
The last fraction of reliability may require broader machine understanding, not just more examples.
Myths
Common Myths
What people think
All driver assistance is self-driving
All driver assistance is self-driving
What actually happens
Reality
Many consumer systems are Level 2 assistance, not true driverless autonomy.
Another Misconception
What people think
More cameras automatically mean safer driving
More cameras automatically mean safer driving
What actually happens
Reality
Safety depends on sensor diversity, software quality, maps, and validation.
Quick answers
Common questions
Are self-driving cars safer? +
In some controlled deployments they show strong safety performance, but comparisons depend heavily on location and conditions.
Do they need the internet? +
They can drive without constant internet but use connectivity for updates, maps, and fleet learning.
When will full autonomy be everywhere? +
Level 5 autonomy in all conditions remains a hard long-term problem.
What happens after a crash? +
Liability depends on jurisdiction, system design, and whether the system was operating within its limits.